主要团队成员:孙培、周逸明
随着通信技术和半导体技术的迅速发展,机器人逐渐从遥远的幻想走进了人们的视线和生活。从最初的机械臂及中控系统在工厂中代替人工劳力,再到智能扫地机器人、送餐机器人代替家庭事务及服务行业,使得机器人产业在社会经济活动中的比重日益扩大,对机器人及其配套的智能系统的研究开发也正在被越来越多的国家和企业纳入战略规划。
多智能体协同控制实验室筹建于2019年5月,并于2020年开始逐步投入使用,本实验室的主要研究方向为智能无人系统的研发和应用。实验室目前拥有室内实验场地超过700平米,并可与研究院共享超过2000平米的室外放飞场地;已配置高精度室内定位系统1套,空地协同无人系统1套,各类型无人车约10套,各类型无人机约15架,四足机器人2台,工业、轻质机械臂2台,另有控制系统实验教学系统5套,工业流程及DCS控制系统1套,可以完成地空异构多智能体协同控制,机械臂人机交互,工业流程监控、控制等领域的研究。
图1:杨欣斌书记带队参观多智能体协同控制实验室(2021年4月)
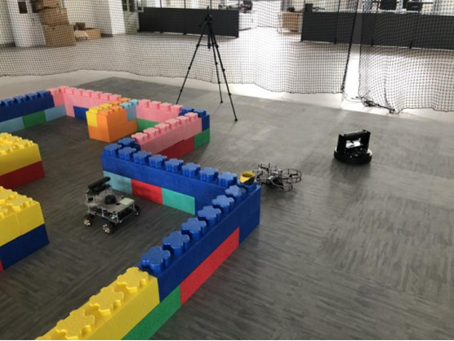
图2:空地协同控制系统的各类无人机和无人车

图3:柔性机械臂和4自由度旋翼控制器